Les travaux de l’équipe ROBIOSS - RObotique BIOmécanique, Sport, Santé s’appuient sur sa double compétence en robotique-mécatronique d’une part, et biomécanique d’autre part pour adresser dans le champ de la robotique une capacité à concevoir des dispositifs mécatroniques complexes et les stratégies de contrôle associées dans un contexte fort d’assistance à l’opérateur et d’interaction entre l’humain et la machine. Les travaux de recherche conduits s’inscrivent, pour l’équipe RoBioSS, dans plusieurs axes thématiques forts : la préhension et la manipulation dextre, la conception de systèmes mécatroniques complexes, la robotique humanoïde et la synthèse de mouvements dynamiques.
Pour répondre aux enjeux en robotique collaborative (collaboration robot-robot ou robot-humain), le préhenseur constitue l’organe flexible par excellence qui permet au robot d’interagir avec son environnement et de produire une variété de tâches. Pour répondre à ces besoins de flexibilité des robots collaboratifs et d’une manière plus générale des assistants robotiques, nous avons développé et mis en œuvre une méthodologie pour la conception de mains robotiques à partir d’un scénario de tâches cibles. La dernière main développée (brevet CNRS) offre des capacités uniques en termes de saisie et de manipulation à l’intérieur de la main.
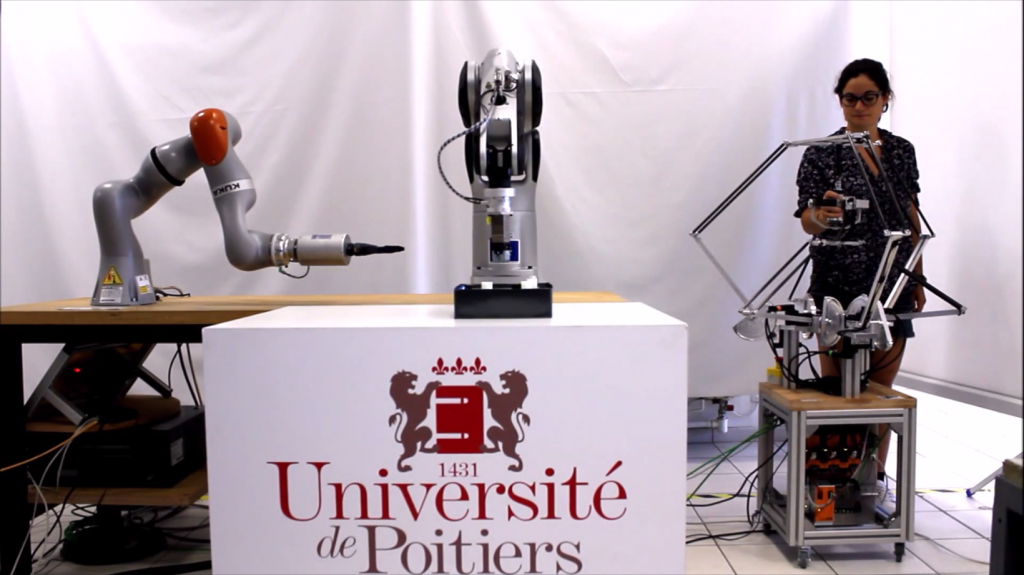
Les recherches concernant l’analyse et la synthèse optimale de mécanismes polyarticulés et de robots parallèles ont permis d’établir des collaborations étroites avec le monde médical, que ce soit au cours du développement d’un robot de télé-échographie ou encore du développement d’un système de télé-opération pour la chirurgie mini-invasive.
La recherche en robotique humanoïde et synthèse de mouvements dynamiques s’appuie sur 4 approches fondamentales : la théorie de la commande optimale, la théorie de l’optimisation, un modèle de commande prédictive (avec le contrôle du ZMP) et le biomimétisme. Nous cherchons à valoriser ces approches à travers le développement d’une nouvelle version du robot humanoïde BIP.
-

- Main robotique à 16 actionneurs
-
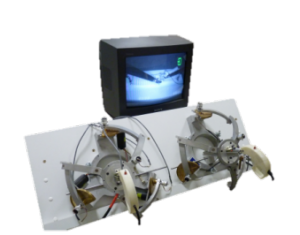
- Système de télé-opération pour la chirurgie mini-invasive
-
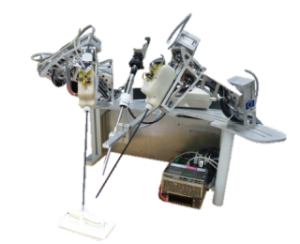
- Système de télé-opération pour la chirurgie mini-invasive
-

- Robot marcheur
Contacts
Jean-Pierre GAZEAU
Ingénieur de Recherche CNRS
Habilité à Diriger des Recherches
Responsable de l’équipe RoBioSS
Tél. : 05 49 49 65 08
E-mail : jean.pierre.gazeau@univ-poitiers.fr
Tout les moyens d'essais dans : Robotique
-

DextRobUp
La plateforme technologique DextRobUP, dédiée à la manipulation dextre et à la robotique collaborative, constitue le support des recherches propres…